Introduction to Dynamic Positioning
6 - DP Vessel Operations
With any DP vessel operation, comprehensive planning is essential. The operational requirements of the task in hand must be thoroughly discussed with the client, and a detailed plan of the preferred sequence of events compiled. The plan must include the approach to the worksite and set-up, together with the positional requirements of the task itself. At all stages there must be adequate contingency plans made.
6.1 - Operational Planning
DP operators (DPOs) must be familiar with the details of the worksite and of the tasks planned. In many operations the vessel is simply providing a working platform for a project team, but it is essential that the key DP personnel are familiar with the detail of the operation and the possible hazards.
6.1.1 - Contingency Planning
It is important that the planning of the worksite approach includes assessment of the various options for reaching a safe situation in foreseeable situations and hazards. One contingency will be for a power or thrust capability shortage caused by partial blackout or thruster failure. Other possibilities include failure of computer systems or position-reference systems, causing a drive-off22. The vessel should be able to reach a safe situation, which might require exit from the worksite, often the worst-case single-point failure.
The DPO will make good use of plans and worksite diagrams provided by the client, either in paper or in electronic form. These drawings are likely to be prepared in UTM projection and co-ordinates. A description of this follows.
6.2 - The UTM Co-Ordinate System
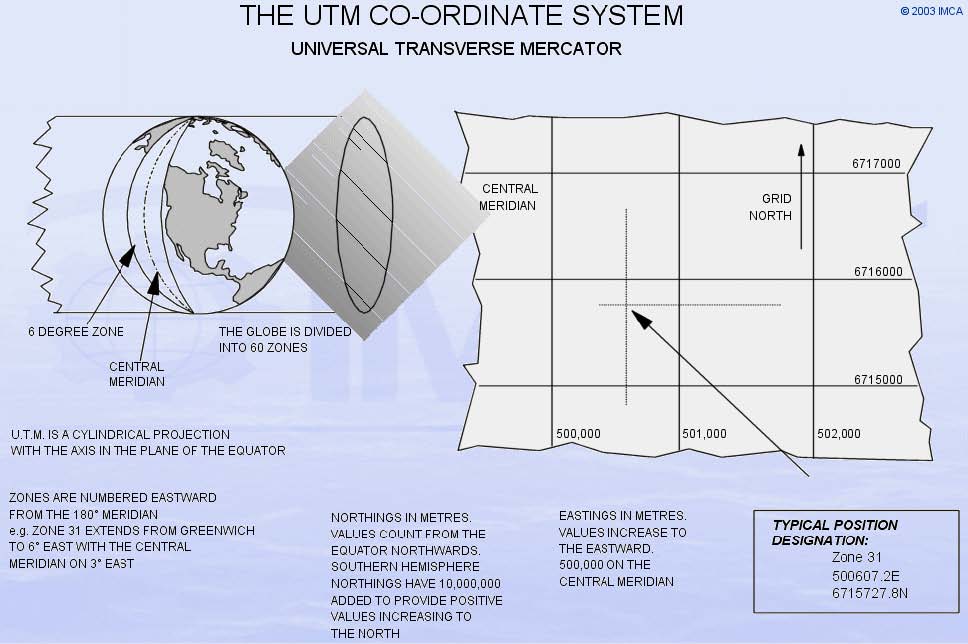
A Geodetic co-ordinate system in widespread use is UTM, or Universal Transverse Mercator. This is a flat-surface, square-grid projection defined by a UTM zone number, and a Northing and Easting distance from the zero point of the zone. Some position reference systems, such as DGPS, may put out positions in UTM co-ordinates.
The Universal Transverse Mercator (UTM) projection is used extensively for survey and other offshore work.
UTM is a cylindrical projection with the axis of the cylinder coincident with the plane of the equator; the line of contact between the cylinder and the sphere is thus a meridian.
Sketch 6.1 - UTM
Obviously a single cylindrical projection of this type cannot be used to chart the whole terrestrial surface. The useful scope of the projection consists of a zone 6°of longitude in width, centred upon the contact or "Central" meridian. Within this zone distortions are minimal. Zones are identified by a number. The numbering scheme is based upon Zone 1 being the area between the 180º meridian and Longitude 174º West, with the central meridian at 177ºW. Successive zones are numbered in an easterly direction, with the North Sea generally being covered by Zone 31 ranging from the Greenwich Meridian to 6ºE, with the Central Meridian at 3ºE. There are sixty zones in total.
Within a particular zone, the Northings and Eastings (in metres) are arranged to increase in a Northward and an Eastward direction, respectively, irrespective of position upon the globe. For Northings the datum is the equator, with Northern hemisphere Northings having a value of zero on the equator, and increasing northwards. For the Southern hemisphere, a false Northing of 10,000,000 is added to the (negative) values. This resolves the problem of requiring positive values increasing Northwards throughout.
A false Easting of 500,000 is established on the central meridian, with Easting values increasing in an easterly direction. This allows the whole zone to be covered by positive Easting values.
6.3 - Worksite Approach
For some vessels, transfer of control must be made from the navigation bridge to the DP console in another location. The vessel will change over well clear of any obstructions, usually outside the 500m zone, and complete a DP checklist. Items to be checked or tested include main engine/thruster control functions, communications (external VHF/internal) radar and navigation aids, gyrocompasses and steering systems. In addition, checks are made on specialist operational items associated with the work. These checks involve the key DP personnel on the bridge and in the engine control room. Thrusters and main propellers must be "proved" by taking manual control and trying each thruster each way, checking response and feedback. Once transfer is complete the watchkeeper may turn his attention to the DP control system5.
6.4 - Final Setting-Up
For some DP operations, further checks are executed in the final working position. A settling period of about thirty minutes is allowed, ensuring that the DP control system has time to build the mathematical model. During this time the bridge watchkeepers should complete the pre-operational checklist, and verify that pre-operational checklists are complete at other locations, such as the engine control room.
The bridge team must be aware of the significant change in status that may occur once the go-ahead (green light) is given for the operation to commence. Once the ‘green light’ is given, the contingency plan may change, because it must allow for the vessel to maintain position and heading adequately to reach a safe situation1.